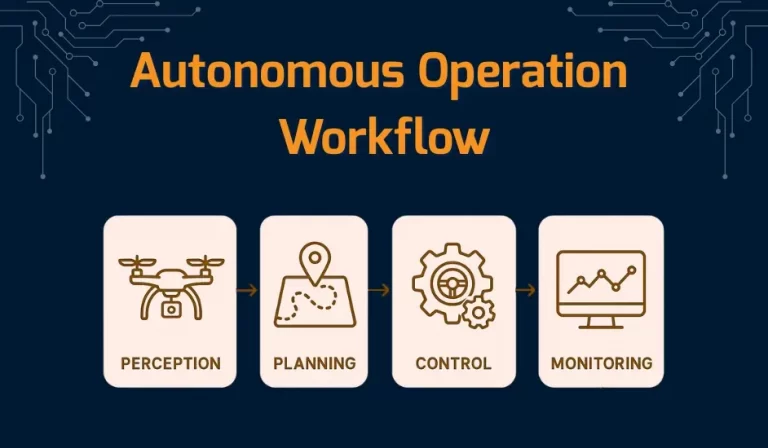
Quadcopters, a subset of unmanned aerial vehicles (UAVs), rely heavily on precise sensor integration, calibration, and tuning mechanisms for achieving autonomous operation. These components ensure stability, accurate navigation, and reliable obstacle avoidance. Autonomous operation is a complex interplay of hardware, software, and mathematical algorithms. By understanding the role of each element in detail, engineers can optimize the performance of quadcopters for various applications, such as surveillance, delivery, and mapping. This case study delves deeply into the significance of sensor integration, calibration, PID tuning, and the Extended Kalman Filter (EKF), explaining their principles, applications, and interdependencies.
Quadcopters, a subset of unmanned aerial vehicles (UAVs), rely heavily on precise sensor integration, calibration, and tuning mechanisms for achieving autonomous operation. These components ensure stability, accurate navigation, and reliable obstacle avoidance. Autonomous operation is a complex interplay of hardware, software, and mathematical algorithms.
Vishnu’s Sketchbook: From the Hectic Mind of a Drone Integrator Vishnu’s Sketchbook: Inside the chaos: Confessions of a drone integrator Vishnu’s Sketchbook: From the Hectic...
By the time this knowledge bomb detonates… You will have a much better understanding of the fundamentals of drones’ autonomous flight Here we go! why ...
Time to discuss what differentiates rookies from pros: Everwonderwhy some drones fly so smoothlywhile others wobble? The trick is in the tuning. PID controllers are...
Quadcopters, a subset of unmanned aerial vehicles (UAVs), rely heavily on precise sensor integration, calibration, and tuning mechanisms for achieving autonomous operation. These components ensure stability, accurate navigation, and reliable obstacle avoidance. Autonomous operation is a complex interplay of hardware, software, and mathematical algorithms. By understanding the role of each element in detail, engineers can optimize the performance of quadcopters for various applications, such as surveillance, delivery, and mapping. This case study delves deeply into the significance of sensor integration, calibration, PID tuning, and the Extended Kalman Filter (EKF), explaining their principles, applications, and interdependencies.
Future Scope
Emerging advancements such as AI-based sensor fusion, adaptive PID tuning, and next-generation IMUs will further revolutionize quadcopter autonomy. These innovations promise smarter, more efficient UAVs capable of tackling increasingly complex missions with minimal human intervention.
![Banner Image [1]](https://www.dronacharyatech.com/wp-content/uploads/2025/10/Banner-Image-1-768x533.png)