
Problem Statement
In most modern drones, advanced features like autonomous navigation, vision detection, and intelligent flight control are already built into the system. These drones work efficiently, but users can only operate them, they cannot clearly understand how the internal communication, processing, and decision-making actually happen.
Our goal with the VIKAS Drone was different. Instead of simply using a ready-made intelligent drone, we wanted to build and understand the complete system ourselves using Raspberry Pi and the MiniPix flight controller.
The Approach
Instead of treating the drone as a closed system, we designed an open architecture to understand:
- Real-time communication between modules
- Flight controller and onboard computer interaction
- Power distribution under dynamic loads
- Autonomous system behavior
- Hardware–software synchronization
This transformed the drone into more than a flying platform—it became an engineering and learning platform.
The Challenges
Challenge 1: Power Instability
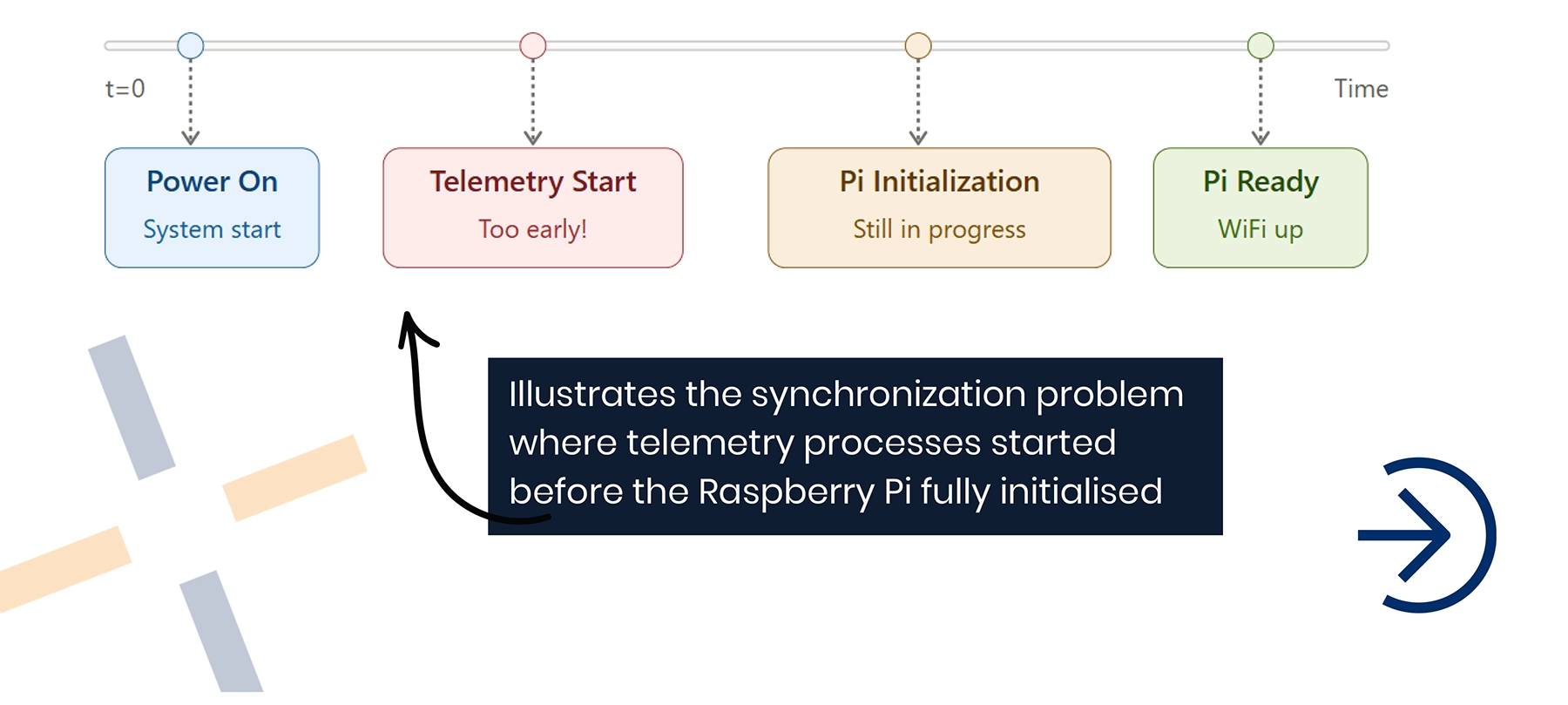
Challenge 2: Boot Timing & Communication
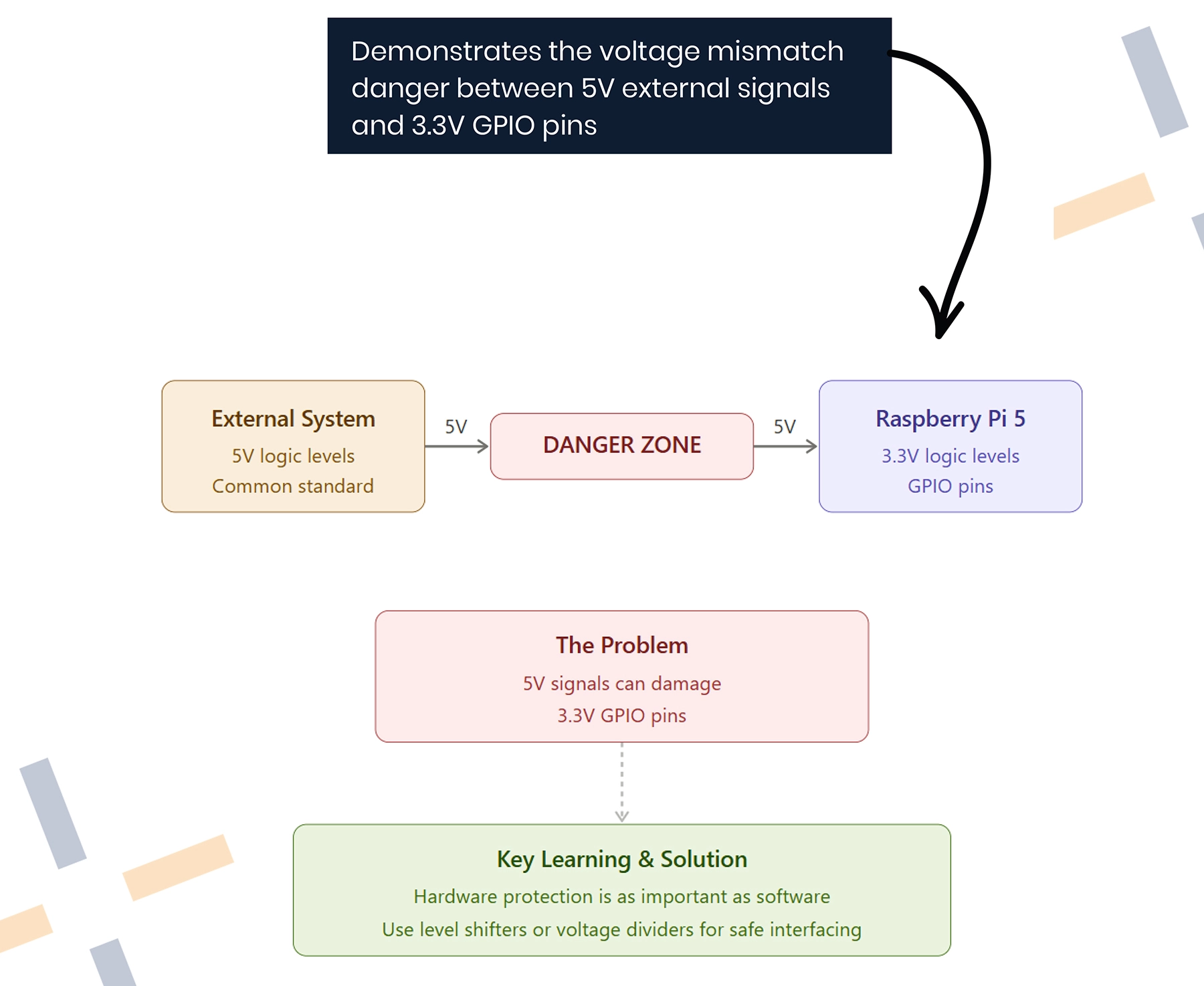
Challenge 3: GPIO Protection & Signal Safety
The Solution?
To stabilise the architecture, we implemented:
- Higher-current UBEC power regulation
- Controlled boot and initialization sequencing
- Optimized UART channel management
- Safe GPIO interfacing practices
- Communication monitoring and debugging workflows
The Outcome
The VIKAS Drone evolved into an intelligent, stable, and modular drone platform that demonstrates how autonomous systems are actually built, not just operated.
Beyond flight performance, the project helped us understand:
- Embedded power management
- Real-time communication
- System synchronization
- Autonomous architecture
- Hardware-software integration